Transmissão de imagens
Introdução
Dentre as funcionalidades implementadas no robô na sprint 3, uma delas é a implementação de uma câmera para a realização da transmissão de vídeo em tempo real. A câmera embutida no robô captura imagens que são transmitidas para um computador. Isso permite ao operador visualizar em tempo real o que o robô está vendo, o que proporciona dados valiosos para a Atvos sobre a limpeza dos tubos do reboiler.
Câmera do robô

Fonte: Elaborado pelo grupo Cannabot
A câmera utilizada é a mesma presente no robô Dobot Magician Lite. Ela é conectada ao Raspberry Pi 4 presente no turtlebot, e assim é configurada para realizar a transmissão das imagens. Ela está posicionada na parte da frente do robô, onde foi fixada com um suporte feito numa impressora 3D, para garantir a qualidade das gravações.
Transmissão do vídeo
Fonte: Elaborado pelo grupo Cannabot
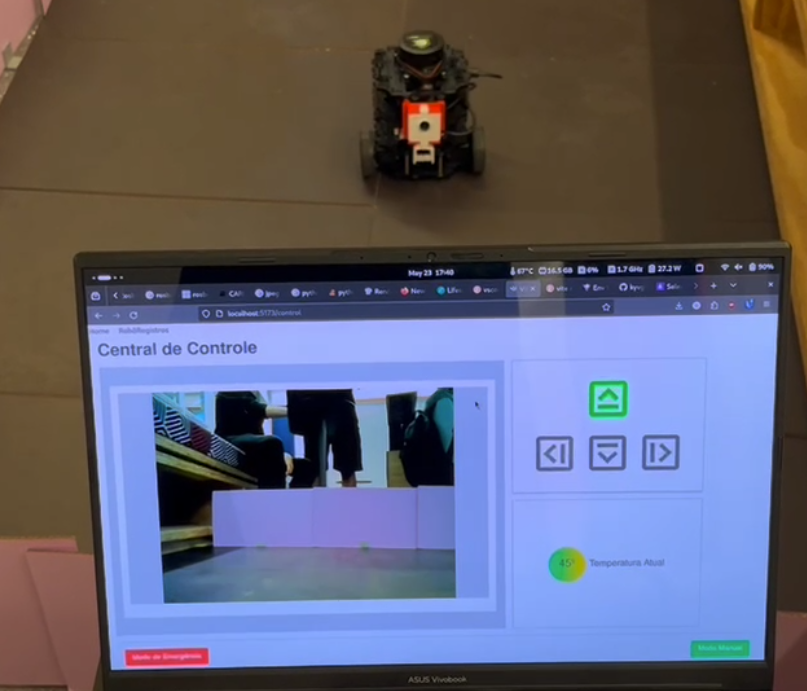
Nesta imagem, é possível ver a transmissão do vídeo em que a câmera embutida no robô transmite em tempo real. A partir do momento que o código é inicializado, a câmera começa e funcionar e enviar as imagens para o computador. Essa transmissão de imagens é feita a partir do websockets, uma tecnologia de comunicação bidirecional que permite a transmissão de dados entre um navegador web e um servidor de maneira eficiente e em tempo real.
Latência
Fonte: Elaborado pelo grupo Cannabot
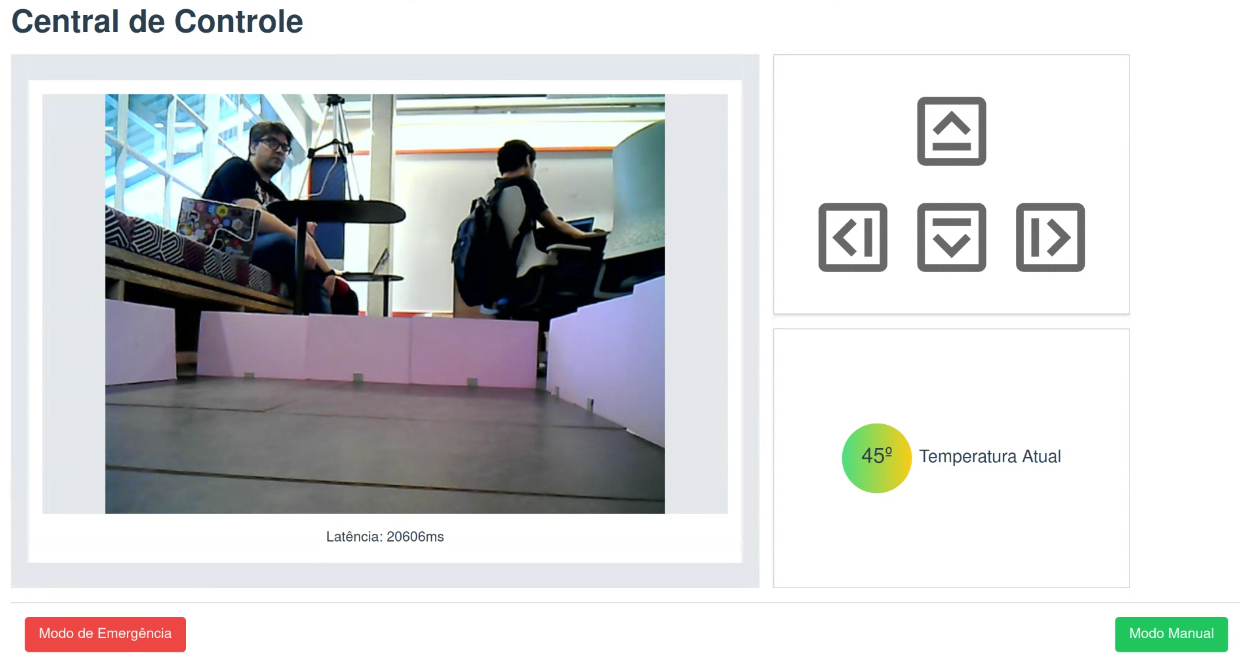
A partir desta outra imagem, é possível ver novamente a tela em que as imagens estão sendo transmitidas. Abaixo do quadro com o vídeo da transmissão, há uma estimativa da latência do processo de aquisição, processamento e envio da imagem.
Na imagem acima, a latência se encontra na casa dos 20 mil milissegundos. Essa é uma estimativa ruim, mas vale ressaltar que no momento desta captura de tela a internet da faculdade estava relativamente fraca. Durante a maioria dos testes o robô apresentou uma latência de aproximadamente 500 milissegundos.
Dessa forma, a equipe conseguiu implementar a transmissão de imagens em tempo real no robô, para fazer o monitoramento e controle dos processos de limpeza dos tubos do reboiler. Esta funcionalidade não só melhora a capacidade de supervisão do operador, mas também proporciona à Atvos dados visuais que podem ser analisados para otimizar ainda mais os processos de limpeza dos reboilers.
Código
Para o funionamento da transmissão de imagens do robô, nós criamos um websocket, que está rodando no robô, que é responsável por enviar as imagens capturadas pela câmera do robô para o nosso frontend. O código do websocket pode ser encontrado no repositório do projeto, através desse caminho(src/package/camera/main.py)
A seguir é apresentado o código do websocket:
class WebSocketServer:
def __init__(self, host='localhost', port=8765, framerate: int = 50):
self.host = host
self.port = port
self.clients = set()
self.loop = None
self.thread = None
self.capture = None
self.sleep_time = 1 / framerate
self.framerate = framerate
self.frame_count = 0
async def register_client(self, websocket):
self.clients.add(websocket)
try:
async for msg in websocket:
pass # Ignore incoming messages
finally:
self.clients.remove(websocket)
async def _broadcast(self, message):
if self.clients:
await asyncio.gather(*[client.send(message) for client in self.clients])
def broadcast(self, message):
"""Synchronous wrapper for the asynchronous _broadcast function."""
if self.loop:
asyncio.run_coroutine_threadsafe(self._broadcast(message), self.loop)
async def websocket_handler(self, websocket, path):
await self.register_client(websocket)
def start_server(self):
self.loop = asyncio.new_event_loop()
asyncio.set_event_loop(self.loop)
server_coro = websockets.serve(self.websocket_handler, self.host, self.port)
self.loop.run_until_complete(server_coro)
self.loop.create_task(self.broadcast_image_forever())
print(f"WebSocket server started on ws://{self.host}:{self.port}")
self.loop.run_forever()
# def run_in_thread(self):
# self.thread = threading.Thread(target=self.start_server)
# self.thread.start()
async def broadcast_image(self):
if not self.capture:
self.capture = cv2.VideoCapture(0)
ret, frame = self.capture.read()
self.frame_count += 1
timestamp = None
if self.frame_count > (self.framerate / 20): # send timestamp every 0.5 seconds
timestamp = datetime.datetime.now()
self.frame_count = 0
if ret:
_, buffer = cv2.imencode('.jpg', frame)
broadcast = {
"bytes": base64.b64encode(buffer).decode('utf-8'),
}
if timestamp:
broadcast["timestamp"] = str(timestamp)
self.broadcast(json.dumps(broadcast))
async def broadcast_image_forever(self):
while not self.loop:
await asyncio.sleep(0.1)
while True:
if len(self.clients) == 0:
if self.capture:
self.capture.release()
self.capture = None
await asyncio.sleep(0.1)
continue
self.loop.create_task(self.broadcast_image())
await asyncio.sleep(self.sleep_time) # 50Hz
A classe WebSocketServer é responsável por gerenciar a configuração e execução do servidor WebSocket, a captura de imagens da câmera e a transmissão dessas imagens para clientes conectados. A seguir a descrição de cada método da classe:
__init__: Inicializa a instância da classe com os parâmetros de host, porta e framerate.register_client: Adiciona um novo cliente à lista de clientes conectados._broadcast: Método assíncrono que envia uma mensagem para todos os clientes conectados.broadcast: Método síncrono que chama o método_broadcastde forma assíncrona. (Wrapper síncrono)websocket_handler: Método assíncrono que gerencia a conexão de um novo cliente.start_server: Inicializa o servidor WebSocket e inicia o loop de eventos.broadcast_image: Captura uma imagem da câmera, codifica em base64 e envia para os clientes conectados.broadcast_image_forever: Método assíncrono que executa o métodobroadcast_imageem loop enquanto houver clientes conectados.
Na próxima, sprint pretendemos buscar forma de melhorar a latência da transmissão de imagens e otimzar o envio de imagens do robô, já que a latência é um fator crítico para a operação do robô, especialmente em ambientes remotos e com conexões de internet instáveis. Além disso, queremos otimizar para que o programa não sobrecarregue o processamento do Raspberry Pi 4.